
Deltares team secures second place in forecasting challenge Atlantic Ocean with new development in particle tracking
Expert(s) |
Kun Yan
|
Martin Verlaan
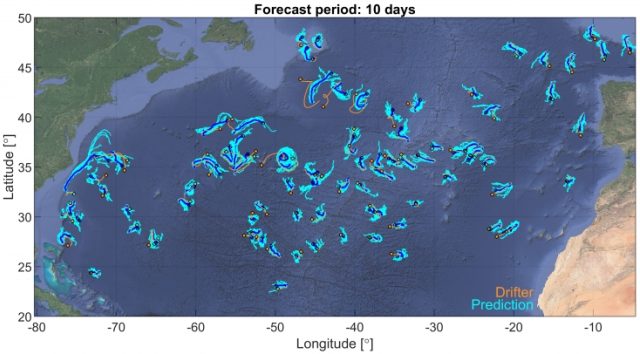
Deltares USA has teamed with Deltares Netherlands to enter the DARPA Forecasting Floats in Turbulence (FFT) challenge. This open competition entails participants to provide a 10-day trajectory forecast, 22nd Nov to 3rd Dec 2021, for the 90 spotters released by DARPA in the Atlantic Ocean.
31 participating teams
The team ended in second place out of a total of 31 participating teams (see scoreboard in Figure 2).
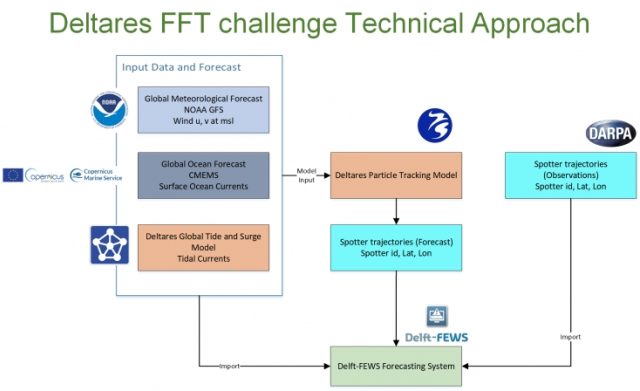
They followed a physically-based modeling approach, which was integrated into a forecasting platform (as shown in Figure 3).
This approach was in contrast to the data-driven approaches, such as machine learning, that were adopted by some of the teams. The tracks of simulated versus observed drifters during the competition period are shown in Figure 1 (orange: observed; dark blue: simulated mean; light blue: simulated ensemble). This animation shows the simulated and observed drifter tracks during the competition:
You have not yet indicated whether you want to accept or reject cookies. This means that this element cannot be displayed.
Or go directly to:
Long experience in particle tracking
Deltares has a long experience with the use of particle tracking software to support its modelling studies. For this competition, the team used a recently developed Lagrangian particle tracking model (the D-PT Model), in which various empirical relations have been replaced by physics-based descriptions of the various forces acting upon the drifters. Prior to the DARPA FFT challenge, the D-PT Model has been applied to various cases in the North Sea in which several different kinds of drifters have been considered. The D-PT Model can also be run in operational forecasting mode as it has been fully integrated in Delft-FEWS, a Deltares Netherlands open forecasting platform. The Delft-FEWS platform allows user-defined release source information, and subsequently runs the D-PT Model in forecasting mode.
Floating objects
Forecasting the trajectories of floating objects at the sea surface is important for applications such as search and rescue operations, oil spill mitigation, tracking of marine plastic debris and larval dispersal. The work enables further refinement of particle tracking techniques in order to improve these applications as well as helping to increase our understanding of air-ocean interface and mesoscale movement in the deep ocean. Our team is extremely happy with the results obtained during the DARPA FFT challenge in the deep ocean. In addition, it is expected that the results would have been even better if the drifters would have been released in shallow areas near the coasts, which would have enabled us to apply the Deltares Global and Tide Surge Model (GTSM) and Global storm surge information system (GLOSSIS).
The D-PT model has been tested in the German Bight case, it is capable of providing operational particle tracking forecast in a Delft-FEWS system.
This article is adapted from the original post by Deltares USA.

